|
800.514.3066customer service |
|||||
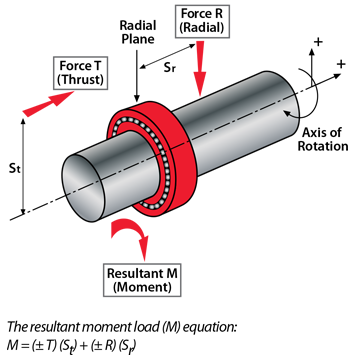
Kaydon bearing load scenarios
Types of Reali-Slim® bearings
Radial and axial (thrust) loads
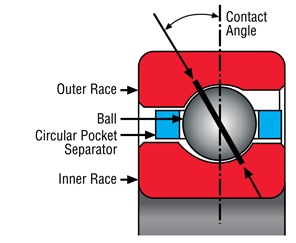
Type A – angular contactThe type A bearing is a conventional design. It features a circular pocket separator and a 30° contact angle along with approximately 67% of a full complement of balls. The chief benefit of the type A bearing is that it provides greater thrust capacity than a type C or type X bearing. Because of its counterbored outer race, type A bearings have unidirectional thrust capacity. Thus, this bearing should be mounted opposed to another bearing to establish and maintain the contact angle, and to support reversing thrust loads. Learn more about Kaydon Reali-Slim® type A angular contact bearings.
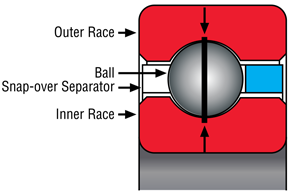
Type C – radial contactThe type C radial contact bearing is a single row radial ball bearing of conventional design. It is a Conrad-type assembly, which means that it is assembled by eccentric displacement of the inner race within the outer race which permits insertion of about half of a full complement of balls. Although the type C bearing is designed primarily for radial load application, it can be configured to accept some axial (thrust) load in either direction. But, if thrust is a concern, a set of angular contact bearings should be considered for the specific application. Learn more about Kaydon Reali-Slim® type C radial contact bearings.
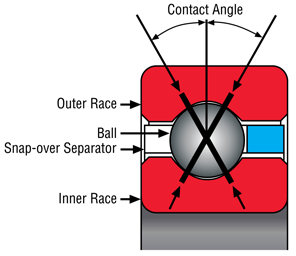
Type X – four-point contactStandard bearing lines are most often designed to handle either radial or axial load conditions. The unique feature about the Kaydon Reali-Slim® type X four-point contact bearing line is that the gothic arch geometry of the inner and outer races enables a single bearing to carry three types of loading (radial, axial and moment) simultaneously. This makes it the bearing of choice for many applications since a single four-point contact bearing can often replace two bearings, providing a simplified design. Type X bearings may also be furnished with an internal diametral preload for those applications requiring greater stiffness or zero free play. This is accomplished by using balls that are larger than the space provided between the raceways. The balls and raceways, therefore, have some elastic deformation in the absence of an external load. Learn more about Kaydon Reali-Slim® type X four-point contact bearings.
Note: Kaydon does not recommend the use of two type X bearings on a common shaft, as it could result in objectionable friction torque. |
|
|||||
|
||||||||
|
|
||||||||