|
||||
 |
+49.2403.7800Kundenservice |
|||
|
< vorherigen | nächster > |
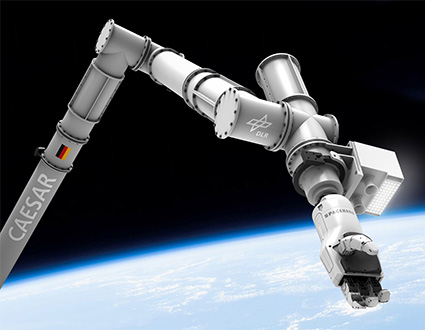
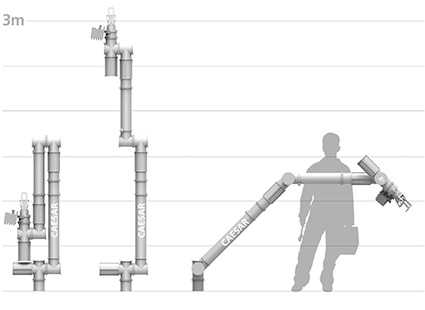
Kaydon FallstudienKeine Odyssee im Weltraum—Dünnringlager von KaydonRund 400 Kilometer über der Erde werden Dünnringlager von Kaydon in einem Roboter auf der Außenseite an der Internationalen Raumstation ISS ihren Dienst verrichten. CAESAR—Compliant Assistance and Exploration SpAce Robot—ist mit einem drei Meter langem Arm und sieben Gelenken ausgestattet. Seine Aufgaben: sich um das Bedienen von wissenschaftlichen und kommerziellen Experimenten in der Schwerelosigkeit zu kümmern.
Der 60 Kilogramm schwere Roboter wird in die Schwerelosigkeit der ISS transportiert und dort in 400 Kilometern Höhe über der Erdoberfläche installiert. Hier wird der faltbare und extrem bewegliche Roboterarm künftig arbeiten und sich um taumelnde oder nicht kooperative Satelliten kümmern, sie greifen und stabilisieren. Das Deutsche Zentrum für Luft- und Raumfahrt (DLR), Entwickler von CAESAR, kann auf ausgezeichnete Erfahrung mit Robotern im Weltraum zurückgreifen. Mit dem Projekt ROKVISS (Robotic Components Verification on the ISS) war von 2005 bis 2010 bereits ein Roboter vom DLR an der ISS im Einsatz. In den Gelenken des Roboters sorgten Dünnringschrägkugellager von Kaydon erfolgreich für reibungslose Bewegungen. „Die Lager sind im Weltraum über Jahre bewährt“, bekräftigt Erich Krämer vom DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen, Deutschland, das im On-Orbit Servicing Projekt DEOS seine Entwicklungen stetig weiter führt. „Hohe Belastbarkeit, Zuverlässigkeit und eben die Erfahrung im Weltraumeinsatz waren entscheidende Argumente für die Dünnringlager, die Kaydon im Programm hat.“
Erfahrungen mit ROKVISS nutzenFür CAESAR konnten die Forscher auf die zahlreichen Erfahrungen mit ROKVISS zurückgreifen, der zum Teil von der Erde aus gesteuert wurde. „Wir haben bei ROKVISS getestet, wie präzise sich der Roboterarm mit einem Joystick mit so genannter Kraftrückmeldung an der ISS steuern lässt. Dabei spürt der Bediener am Boden die Kraft, mit der der Roboter im Weltraum gegen seine Umgebung drückt“, erklärt ROKVISS-Projektleiter Klaus Landzettel. Der Prototyp des Weltraumroboterarms wurde 2011 mit einer Sojus-Kapsel zurück auf die Erde gebracht und diente den Wissenschaftlern mit seinen Daten über den Verschleißzustand als Grundlage für den Bau des neuen Modells. CAESAR ist nun die Fortführung der kraft- und drehmomentgeregelten Robotersysteme des DLR und das Weltraum-Pendant zu den gegenwärtigen Servicerobotern, die in der Fertigung und für Mensch-Roboter-Kooperationen eingesetzt werden. Die neue Robotergeneration vereint innovative Elektronik und Mechanik. So verfügt der Roboter über sieben Freiheitsgrade. Diese Anzahl frei wählbarer Bewegungsmöglichkeiten entspricht dadurch der des menschlichen Arms, was ihm gegenüber Standardrobotern eine höhere Flexibilität verleiht. Basis des für Erkundung und Assistenz im Weltraum entwickelten Roboters ist der Leichtbauroboter III, der 2003 vom Institut entwickelt und an den weltweit führenden Roboterhersteller KUKA transferiert wurde.
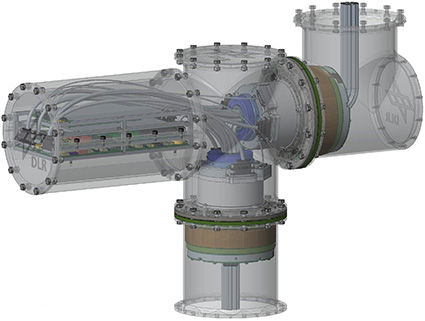
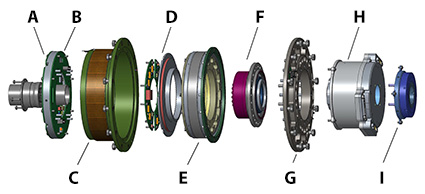
Reibungslose Bewegungs- und KraftregelungCAESAR kann semi-autonom, teleoperiert oder mit Telepräsenz und Kraftrückkopplung betrieben werden. Die Impedanzregelung lässt die Gelenke des Arms nachgiebig bleiben und verhindert Beschädigung an den Objekten. Die eingebaute Drehmomentsensorik stellt ungewollten Kontakt mit der Umgebung fest und ermöglicht entsprechende Reaktionen, was vor allem in der Zusammenarbeit mit Astronauten ein wesentliches Sicherheitsmerkmal darstellt. Da 3 es keine Schwerkraftbelastung im Raum gibt, haben alle Verbindungen die gleiche Drehmomentfähigkeit. Für die reibungslose Bewegungs- und Kraftregelung sorgen schnelle Regelkreise in den Gelenken und ein Hochgeschwindigkeits-Echtzeit-Kommunikationsbus, der die Gelenke mit der Robot Control Unit (RCU) verbindet. Die Verbindungskonstruktion sieht eine Hohlwelle vor, um eine interne Verkabelung zu ermöglichen. „Die Gelenke bestehen jeweils aus einem Synchronmotor mit Kommutierungssensor, einem harmonischen Antriebszahnrad und Schräglagern, dem Drehmomentsensor und einem gemeinsamen Positionssensor“, erklärt Erich Krämer vom DLR. Ausgewählt wurden Dünnringschrägkugellager, die besonders effizient sowohl Radial- als auch Axialkräfte aufnehmen können und dabei besonders raumsparend sind. „Die Reali-Slim-Serie, der die hier verwendeten Dünnringlager entstammen, besteht unter härtesten Einsatzbedingungen“, bestätigt Ulrich Schroth, Product Manager bei Rodriguez, dem deutschen Vertriebspartner von Kaydon, der das Projekt betreut. „Sie bieten kompaktes Design, hohe Genauigkeit und sind ideal für solch anspruchsvolle Anwendungen.“
Dauergast im OrbitDa in Zukunft die meisten Dienstleistungen für geostationäre Satelliten erbracht werden, sind die Strahlungshärte und die Lebensdauer von CAESAR auf fünfzehn Jahre Betrieb im geostationären Orbit kalkuliert. Der gesamte Roboter ist für Temperaturen zwischen -20° Grad Celsius bis +60° Grad Celsius ausgelegt. Geplant ist, dieses System auch für weitere Anforderungen zu bauen. Dazu muss es an verschiedene Träger, Satelliten oder Raumfahrzeuge angepasst werden können. Die Produktion und Qualifizierung des Systems muss effizient und genau sein, um den wirtschaftlichen Erfolg zu ermöglichen. „Falls ein Technologietransfer des CAESAR Weltraumroboters an einen Industriepartner zustande kommt, wird es sicher auch mit Kaydon zu weiterer Zusammenarbeit kommen“, resümiert Erich Krämer. |
|
||
|
||||||||
|
|
||||||||